Standard definition: "A vector is a directed line segment." This is usually the limit of a graduate's knowledge of vectors. Who needs some kind of "directed segments"?
But in fact, what are vectors and why are they?
Weather forecast. "Wind northwest, speed 18 meters per second." Agree, the direction of the wind (where it blows from) and the module (that is, the absolute value) of its speed also matter.
Quantities that have no direction are called scalars. Mass, work, electric charge are not directed anywhere. They are characterized only by a numerical value - “how many kilograms” or “how many joules”.
Physical quantities that have not only an absolute value, but also a direction are called vector quantities.
Speed, force, acceleration - vectors. For them, it is important "how much" and it is important "where". For example, the free fall acceleration is directed towards the Earth's surface, and its value is 9.8 m/s 2 . Momentum, electric field strength, magnetic field induction are also vector quantities.
You remember that physical quantities are denoted by letters, Latin or Greek. The arrow above the letter indicates that the quantity is a vector:
Here is another example.
The car is moving from A to B. The end result is its movement from point A to point B, i.e. movement by a vector  .
.

Now it is clear why a vector is a directed segment. Pay attention, the end of the vector is where the arrow is. Vector length is called the length of this segment. Designated: or
So far, we have been working with scalar quantities, according to the rules of arithmetic and elementary algebra. Vectors are a new concept. This is another class of mathematical objects. They have their own rules.
Once upon a time, we didn’t even know about numbers. Acquaintance with them began in elementary grades. It turned out that numbers can be compared with each other, added, subtracted, multiplied and divided. We learned that there is a number one and a number zero.
Now we get to know vectors.
The concepts of "greater than" and "less than" do not exist for vectors - after all, their directions can be different. You can only compare the lengths of vectors.
But the concept of equality for vectors is.
Equal are vectors that have the same length and the same direction. This means that the vector can be moved parallel to itself to any point in the plane.
single is called a vector whose length is 1 . Zero - a vector whose length is equal to zero, that is, its beginning coincides with the end.
It is most convenient to work with vectors in a rectangular coordinate system - the one in which we draw function graphs. Each point in the coordinate system corresponds to two numbers - its x and y coordinates, abscissa and ordinate.
The vector is also given by two coordinates:
Here, the coordinates of the vector are written in brackets - in x and in y.
They are easy to find: the coordinate of the end of the vector minus the coordinate of its beginning.

If the vector coordinates are given, its length is found by the formula

Vector addition
There are two ways to add vectors.
one . parallelogram rule. To add the vectors and , we place the origins of both at the same point. We complete the parallelogram and draw the diagonal of the parallelogram from the same point. This will be the sum of the vectors and .

Remember the fable about the swan, cancer and pike? They tried very hard, but they never moved the cart. After all, the vector sum of the forces applied by them to the cart was equal to zero.
2. The second way to add vectors is the triangle rule. Let's take the same vectors and . We add the beginning of the second to the end of the first vector. Now let's connect the beginning of the first and the end of the second. This is the sum of the vectors and .

By the same rule, you can add several vectors. We attach them one by one, and then connect the beginning of the first to the end of the last.

Imagine that you are going from point A to point B, from B to C, from C to D, then to E and then to F. The end result of these actions is a move from A to F.
When adding vectors and we get:
![]()
Vector subtraction
The vector is directed opposite to the vector . The lengths of the vectors and are equal.
Now it is clear what subtraction of vectors is. The difference of the vectors and is the sum of the vector and the vector .

Multiply a vector by a number
Multiplying a vector by a number k results in a vector whose length is k times different from the length . It is codirectional with the vector if k is greater than zero, and directed oppositely if k is less than zero.

Dot product of vectors
Vectors can be multiplied not only by numbers, but also by each other.
The scalar product of vectors is the product of the lengths of vectors and the cosine of the angle between them.

Pay attention - we multiplied two vectors, and we got a scalar, that is, a number. For example, in physics, mechanical work is equal to the scalar product of two vectors - force and displacement:
![]()
If the vectors are perpendicular, their dot product is zero.
And this is how the scalar product is expressed in terms of the coordinates of the vectors and:
From the formula for the scalar product, you can find the angle between the vectors:

This formula is especially convenient in stereometry. For example, in problem 14 of the Profile USE in mathematics, you need to find the angle between intersecting lines or between a line and a plane. Problem 14 is often solved several times faster by the vector method than by the classical one.
In the school curriculum in mathematics, only the scalar product of vectors is studied.
It turns out that, in addition to the scalar, there is also a vector product, when a vector is obtained as a result of multiplying two vectors. Who passes the exam in physics, knows what the Lorentz force and the Ampère force are. The formulas for finding these forces include exactly vector products.
Vectors are a very useful mathematical tool. You will be convinced of this in the first course.

2018 Olshevsky Andrey Georgievich
Site filled with books, you can download books
Vectors on the plane and in space, ways to solve problems, examples, formulas
1 Vectors in space
Vectors in space include geometry 10, class 11 and analytic geometry. Vectors allow you to effectively solve the geometric problems of the second part of the exam and analytical geometry in space. Vectors in space are given in the same way as vectors in the plane, but the third coordinate z is taken into account. Exclusion from vectors in the space of the third dimension gives vectors on the plane, which explains the geometry of 8, 9 class.
1.1 Vector on the plane and in space
A vector is a directed segment with a beginning and an end, indicated by an arrow in the figure. An arbitrary point in space can be considered a null vector. The zero vector has no specific direction, since the beginning and end are the same, so it can be given any direction.
Vector translated from English means vector, direction, course, guidance, direction setting, aircraft heading.
The length (modulus) of a non-zero vector is the length of the segment AB, which is denoted  . Vector length
. Vector length  denoted
denoted  . Zero vector has length equal to zero
. Zero vector has length equal to zero  = 0.
= 0.
Collinear vectors are non-zero vectors that lie on the same line or on parallel lines.



The zero vector is collinear to any vector.
Codirectional are called collinear non-zero vectors that have one direction. Codirectional vectors are denoted by . For example, if the vector is codirectional with the vector  , then the notation is used.
, then the notation is used.

The zero vector is codirectional with any vector.
Oppositely directed are two collinear non-zero vectors that have the opposite direction. Oppositely directed vectors are denoted by ↓. For example, if the vector is opposite to the vector , then the notation ↓ is used.

Codirectional vectors of equal length are called equal.

Many physical quantities are vector quantities: force, speed, electric field.
If the point of application (beginning) of the vector is not set, then it is chosen arbitrarily.
If the beginning of the vector is placed at the point O, then it is considered that the vector is postponed from the point O. From any point, a single vector equal to the given vector can be plotted.
1.2 Sum of vectors
When adding vectors according to the triangle rule, vector 1 is drawn, from the end of which vector 2 is drawn and the sum of these two vectors is vector 3, drawn from the beginning of vector 1 to the end of vector 2:

For arbitrary points A , B and C, you can write the sum of vectors:
+ =
=

If two vectors start from the same point

then it is better to add them according to the parallelogram rule.
When two vectors are added according to the parallelogram rule, the added vectors are laid off from one point, a parallelogram is completed from the ends of these vectors by applying the beginning of another to the end of one vector. The vector formed by the diagonal of the parallelogram, originating from the start point of the added vectors, will be the sum of the vectors

The parallelogram rule contains a different order of addition of vectors according to the triangle rule.
Vector addition laws:
1. The commutative law + = + .
2. Associative law ( + ) +  =
+ (
+
).
=
+ (
+
).
If it is necessary to add several vectors, then the vectors are added in pairs or according to the polygon rule: vector 2 is drawn from the end of vector 1, vector 3 is drawn from the end of vector 2, vector 4 is drawn from the end of vector 3, vector 5 is drawn from the end of vector 4, etc. A vector that is the sum of several vectors is drawn from the beginning of vector 1 to the end of the last vector.

According to the laws of vector addition, the order of vector addition does not affect the resulting vector, which is the sum of several vectors.
Opposite are two non-zero oppositely directed vectors of equal length. Vector - is the opposite of a vector

These vectors are oppositely directed and equal in absolute value. 
1.3 Vector difference
The difference of vectors can be written as the sum of vectors
- = + (-),
where "-" is the vector opposite to the vector .
Vectors and - can be added according to the rule of a triangle or a parallelogram.
Let vectors and

To find the difference of vectors - we build a vector -

We add the vectors and - according to the triangle rule, applying the beginning of the vector - to the end of the vector, we got the vector + (-) = -

We add the vectors and - according to the parallelogram rule, postponing the beginnings of the vectors and - from one point

If the vectors and originate from the same point
 ,
,
then the difference of vectors - gives a vector connecting their ends and the arrow at the end of the resulting vector is placed in the direction of the vector from which the second vector is subtracted


The figure below shows the addition and difference of vectors

The figure below shows the addition and difference of vectors in different ways.

Task. Given vectors and .

Draw the sum and difference of vectors in all possible ways in all possible combinations of vectors.
1.4 Collinear vector lemma
= k
1.5 Multiplication of a vector by a number
The product of a non-zero vector by a number k gives a vector = k , collinear to the vector . Vector length :
| | = |k |·| |
If k > 0, then the vectors and are codirectional.
If k = 0, then the vector is zero.
If k< 0, то векторы и противоположно направленные.
If | k | = 1, then the vectors and are of equal length.
If k = 1, then and equal vectors.
If k = -1, then opposite vectors.
If | k | > 1, then the length of the vector is greater than the length of the vector .
If k > 1, then the vectors and are codirectional and the length is greater than the length of the vector .
If k< -1, то векторы и противоположно направленные и длина больше длины вектора .
If | k |< 1, то длина вектора меньше длины вектора .
If 0< k< 1, то векторы и сонаправленные и длина меньше длины вектора .
If -1< k< 0, то векторы и противоположно направленные и длина меньше длины вектора .
The product of a zero vector by a number gives a zero vector.
Task. Given a vector .

Construct vectors 2 , -3 , 0.5 , -1.5 .
Task. Given vectors and .

Construct vectors 3 + 2 , 2 - 2 , -2 - .
Laws describing the multiplication of a vector by a number
1. Combination law (kn) = k (n)
2. The first distributive law k ( + ) = k + k .
3. The second distributive law (k + n) = k + n.
For collinear vectors and , if ≠ 0, there is a single number k that allows expressing the vector in terms of:
= k
1.6 Coplanar vectors
Coplanar vectors are those that lie in the same plane or in parallel planes. If you draw vectors equal to given coplanar vectors from one point, then they will lie in the same plane. Therefore, we can say that vectors are called coplanar if there are equal vectors lying in the same plane.
Two arbitrary vectors are always coplanar. The three vectors may or may not be coplanar. Three vectors, of which at least two are collinear, are coplanar. Collinear vectors are always coplanar.
1.7 Decomposition of a vector in two non-collinear vectors
Any vector  uniquely decomposes on the plane in two noncollinear nonzero vectors
uniquely decomposes on the plane in two noncollinear nonzero vectors  and
and  with only expansion coefficients x and y :
with only expansion coefficients x and y :
= x+y
Any vector coplanar to non-zero vectors and is uniquely decomposed in two non-collinear vectors and with unique expansion coefficients x and y :
= x+y
Let us expand the given vector on the plane according to the given noncollinear vectors and :

Draw from one point the given coplanar vectors

From the end of the vector we draw lines parallel to the vectors and to the intersection with the lines drawn through the vectors and . Get a parallelogram

The lengths of the sides of the parallelogram are obtained by multiplying the lengths of the vectors and by the numbers x and y, which are determined by dividing the lengths of the sides of the parallelogram by the lengths of the corresponding vectors and. We get the decomposition of the vector in given non-collinear vectors and :
= x+y
In the problem being solved, x ≈ 1.3, y ≈ 1.9, so the expansion of the vector in given noncollinear vectors and can be written as
1,3 + 1,9 .

In the problem being solved, x ≈ 1.3, y ≈ -1.9, so the expansion of the vector in given non-collinear vectors and can be written as
1,3 - 1,9 .
1.8 Box rule
A parallelepiped is a three-dimensional figure whose opposite faces consist of two equal parallelograms lying in parallel planes.
The parallelepiped rule allows you to add three non-coplanar vectors that are drawn from one point and construct a parallelepiped so that the summed vectors form its edges, and the remaining edges of the parallelepiped are respectively parallel and equal to the lengths of the edges formed by the summed vectors. The diagonal of the parallelepiped forms a vector that is the sum of the given three vectors, which starts from the start point of the added vectors.

1.9 Decomposition of a vector in three non-coplanar vectors
Any vector  expands in three given non-coplanar vectors
expands in three given non-coplanar vectors  ,
,
 and with single expansion coefficients x, y, z:
and with single expansion coefficients x, y, z:
= x + y + z .
1.10 Rectangular coordinate system in space
In three-dimensional space, the rectangular coordinate system Oxyz is defined by the origin O and the mutually perpendicular coordinate axes Ox , Oy and Oz intersecting in it with selected positive directions indicated by arrows and the unit of measurement of the segments. If the scale of the segments is the same along all three axes, then such a system is called a Cartesian coordinate system.
Coordinate x is called the abscissa, y is the ordinate, z is the applicate. Point M coordinates are written in brackets M (x ; y ; z ).
1.11 Vector coordinates in space
In space, let's set a rectangular coordinate system Oxyz . From the origin in the positive directions of the axes Ox , Oy , Oz we draw the corresponding unit vectors  ,
,
 ,
,
 , which are called coordinate vectors and are non-coplanar. Therefore, any vector can be decomposed into three given non-coplanar coordinate vectors , and with the only expansion coefficients x , y , z :
, which are called coordinate vectors and are non-coplanar. Therefore, any vector can be decomposed into three given non-coplanar coordinate vectors , and with the only expansion coefficients x , y , z :
= x + y + z .
The expansion coefficients x , y , z are the coordinates of the vector in a given rectangular coordinate system, which are written in brackets (x ; y ; z ). Zero vector has coordinates equal to zero  (0; 0; 0). For equal vectors, the corresponding coordinates are equal.
(0; 0; 0). For equal vectors, the corresponding coordinates are equal.
Rules for finding the coordinates of the resulting vector:
1. When summing two or more vectors, each coordinate of the resulting vector is equal to the sum of the corresponding coordinates of the given vectors. If two vectors are given (x 1 ; y 1 ; z 1) and (x 1 ; y 1 ; z 1), then the sum of vectors + gives a vector with coordinates (x 1 + x 1 ; y 1 + y 1 ; z 1 + z1)
+ = (x 1 + x 1 ; y 1 + y 1 ; z1 + z1)
2. The difference is a kind of sum, so the difference of the corresponding coordinates gives each coordinate of the vector obtained by subtracting the two given vectors. If two vectors are given (x a ; y a ; z a ) and (x b ; y b ; z b ), then the difference of the vectors - gives a vector with coordinates (x a - x b ; y a - y b ; z a - z b )
- = (x a - x b ; y a - y b ; z a - z b )
3. When multiplying a vector by a number, each coordinate of the resulting vector is equal to the product of this number by the corresponding coordinate of the given vector. Given a number k and a vector (x ; y ; z ), then multiplying the vector by the number k gives a vector k with coordinates
k = (kx ; ky ; kz ).
Task. Find the coordinates of the vector = 2 - 3 + 4 if the coordinates of the vectors are (1; -2; -1), (-2; 3; -4), (-1; -3; 2).
Solution
2 + (-3) + 4
2 = (2 1; 2 (-2); 2 (-1)) = (2; -4; -2);
3 = (-3 (-2); -3 3; -3 (-4)) = (6; -9; 12);
4 = (4 (-1); 4 (-3); 4 2) = (-4; -12; 8).
= (2 + 6 - 4; -4 - 9 -12; -2 + 12 + 8) = (4; -25; 18).
1.12 Vector, radius vector and point coordinates
The vector coordinates are the coordinates of the end of the vector, if the beginning of the vector is placed at the origin.
A radius vector is a vector drawn from the origin to a given point, the coordinates of the radius vector and the point are equal.
If the vector  given by points M 1 (x 1; y 1; z 1) and M 2 (x 2; y 2; z 2), then each of its coordinates is equal to the difference between the corresponding coordinates of the end and beginning of the vector
given by points M 1 (x 1; y 1; z 1) and M 2 (x 2; y 2; z 2), then each of its coordinates is equal to the difference between the corresponding coordinates of the end and beginning of the vector

For collinear vectors = (x 1 ; y 1 ; z 1) and = (x 2 ; y 2 ; z 2), if ≠ 0, there is a single number k that allows expressing the vector in terms of:
= k
Then the coordinates of the vector are expressed in terms of the coordinates of the vector
= (kx 1 ; ky1; kz 1)
The ratio of the corresponding coordinates of collinear vectors is equal to the single number k

1.13 Vector length and distance between two points
The length of the vector (x; y; z) is equal to the square root of the sum of the squares of its coordinates

The length of the vector, given by the points of the beginning M 1 (x 1; y 1; z 1) and the end M 2 (x 2; y 2; z 2) is equal to the square root of the sum of the squares of the difference between the corresponding coordinates of the end of the vector and the beginning
Distance d between two points M 1 (x 1 ; y 1 ; z 1) and M 2 (x 2 ; y 2 ; z 2) is equal to the length of the vector

There is no z coordinate on the plane
Distance between points M 1 (x 1; y 1) and M 2 (x 2; y 2)
1.14 Coordinates of the middle of the segment
If point C is the midpoint of the segment AB , then the radius vector of point C in an arbitrary coordinate system with origin at point O is equal to half the sum of the radius vectors of points A and B

If the coordinates of the vectors  (x ; y ; z ),
(x ; y ; z ),  (x 1 ; y 1 ; z 1),
(x 1 ; y 1 ; z 1),  (x 2; y 2; z 2), then each vector coordinate is equal to half the sum of the corresponding coordinates of the vectors and
(x 2; y 2; z 2), then each vector coordinate is equal to half the sum of the corresponding coordinates of the vectors and
 ,
,
 ,
,

=
(x, y, z) = 
Each of the coordinates of the middle of the segment is equal to half the sum of the corresponding coordinates of the ends of the segment.
1.15 Angle between vectors
The angle between vectors is equal to the angle between the rays drawn from one point and co-directed with these vectors. The angle between vectors can be from 0 0 to 180 0 inclusive. The angle between codirectional vectors is equal to 0 0 . If one vector or both are zero, then the angle between the vectors, at least one of which is zero, is equal to 0 0 . The angle between perpendicular vectors is 90 0 . The angle between oppositely directed vectors is 180 0 .


1.16 Vector projection

1.17 Dot product of vectors
The scalar product of two vectors is a number (scalar) equal to the product of the lengths of the vectors and the cosine of the angle between the vectors

If  = 0 0 , then the vectors are codirectional
= 0 0 , then the vectors are codirectional  and
and  = cos 0 0 = 1, therefore, the scalar product of codirectional vectors is equal to the product of their lengths (modules)
= cos 0 0 = 1, therefore, the scalar product of codirectional vectors is equal to the product of their lengths (modules)
 .
.
If the angle between vectors is 0<
 < 90 0 , то косинус угла между такими векторами больше
нуля
< 90 0 , то косинус угла между такими векторами больше
нуля
 , hence the scalar product is greater than zero
, hence the scalar product is greater than zero  .
.
If non-zero vectors are perpendicular, then their scalar product is zero  , since cos 90 0 = 0. The scalar product of perpendicular vectors is equal to zero.
, since cos 90 0 = 0. The scalar product of perpendicular vectors is equal to zero.
If  , then the cosine of the angle between such vectors is less than zero
, then the cosine of the angle between such vectors is less than zero  , so the scalar product is less than zero
, so the scalar product is less than zero  .
.
As the angle between vectors increases, the cosine of the angle between them  decreases and reaches a minimum value at
decreases and reaches a minimum value at  = 180 0 when the vectors are oppositely directed
= 180 0 when the vectors are oppositely directed  . Since cos 180 0 = -1, then
. Since cos 180 0 = -1, then  . The scalar product of oppositely directed vectors is equal to the negative product of their lengths (modules).
. The scalar product of oppositely directed vectors is equal to the negative product of their lengths (modules).
The scalar square of a vector is equal to the modulus of the vector squared

The scalar product of vectors, at least one of which is zero, is equal to zero.
1.18 The physical meaning of the scalar product of vectors
From the course of physics it is known that the work A of the force  while moving the body
while moving the body  is equal to the product of the lengths of the force and displacement vectors and the cosine of the angle between them, that is, it is equal to the scalar product of the force and displacement vectors
is equal to the product of the lengths of the force and displacement vectors and the cosine of the angle between them, that is, it is equal to the scalar product of the force and displacement vectors


If the force vector is co-directed with the movement of the body, then the angle between the vectors  = 0 0 , therefore, the work of the force on displacement is maximum and is equal to A =
= 0 0 , therefore, the work of the force on displacement is maximum and is equal to A =  .
.
If 0< < 90 0 , то работа силы на перемещении положительна A > 0.
If = 90 0 , then the work of the force on displacement is equal to zero A = 0.
If 90 0< < 180 0 , то работа силы на перемещении отрицательна A < 0.
If the force vector is opposite to the movement of the body, then the angle between the vectors = 180 0, therefore, the work of the force on the movement is negative and equal to A = -.
Task. Determine the work of gravity when lifting a passenger car weighing 1 ton along a 1 km long track with an inclination angle of 30 0 to the horizon. How many liters of water at a temperature of 20 0 can be boiled using this energy?
Solution

Work A gravity  when moving the body, it is equal to the product of the lengths of the vectors and the cosine of the angle between them, that is, it is equal to the scalar product of the vectors of gravity and displacement
when moving the body, it is equal to the product of the lengths of the vectors and the cosine of the angle between them, that is, it is equal to the scalar product of the vectors of gravity and displacement

Gravity
G \u003d mg \u003d 1000 kg 10 m / s 2 \u003d 10,000 N.
 = 1000 m.
= 1000 m.
Angle between vectors  = 1200. Then
= 1200. Then
cos 120 0 \u003d cos (90 0 + 30 0) \u003d - sin 30 0 \u003d - 0.5.
Substitute
A \u003d 10,000 N 1000 m (-0.5) \u003d - 5,000,000 J \u003d - 5 MJ.
1.19 Dot product of vectors in coordinates
Dot product of two vectors  = (x 1 ; y 1 ; z 1) and
= (x 1 ; y 1 ; z 1) and  \u003d (x 2; y 2; z 2) in a rectangular coordinate system is equal to the sum of the products of the coordinates of the same name
\u003d (x 2; y 2; z 2) in a rectangular coordinate system is equal to the sum of the products of the coordinates of the same name
 = x 1 x 2 + y 1 y 2 + z 1 z 2 .
= x 1 x 2 + y 1 y 2 + z 1 z 2 .
1.20 The condition of perpendicularity of vectors
If non-zero vectors \u003d (x 1; y 1; z 1) and \u003d (x 2; y 2; z 2) are perpendicular, then their scalar product is zero
If one non-zero vector = (x 1; y 1; z 1) is given, then the coordinates of the vector perpendicular (normal) to it = (x 2; y 2; z 2) must satisfy the equality
x 1 x 2 + y 1 y 2 + z 1 z 2 = 0.
There are an infinite number of such vectors.
If one non-zero vector = (x 1; y 1) is set on the plane, then the coordinates of the vector perpendicular (normal) to it = (x 2; y 2) must satisfy the equality
x 1 x 2 + y 1 y 2 = 0.

If a non-zero vector = (x 1 ; y 1) is set on the plane, then it is sufficient to set arbitrarily one of the coordinates of the vector perpendicular (normal) to it = (x 2 ; y 2) and from the condition of perpendicularity of the vectors
x 1 x 2 + y 1 y 2 = 0
express the second coordinate of the vector .
For example, if we substitute an arbitrary x 2 coordinate, then
y 1 y 2 = - x 1 x 2 .
The second coordinate of the vector

If you give x 2 \u003d y 1, then the second coordinate of the vector

If a non-zero vector = (x 1; y 1) is given on the plane, then the vector perpendicular (normal) to it = (y 1; -x 1).
If one of the coordinates of a non-zero vector is equal to zero, then the vector has the same coordinate not equal to zero, and the second coordinate is equal to zero. Such vectors lie on the coordinate axes, therefore they are perpendicular.
Let's define the second vector, perpendicular to the vector = (x 1 ; y 1), but opposite to the vector  , that is, the vector - . Then it suffices to change the signs of the coordinates of the vector
, that is, the vector - . Then it suffices to change the signs of the coordinates of the vector
- = (-y1; x1)
1 = (y1; -x1)
2 = (-y1; x1).
Task.
Solution
Coordinates of two vectors perpendicular to the vector = (x 1; y 1) on the plane
1 = (y1; -x1)
2 = (-y1; x1).
We substitute the coordinates of the vector = (3; -5)
1 = (-5; -3),
2 = (-(-5); 3) = (5; 3).
x 1 x 2 + y 1 y 2 = 0
3 (-5) + (-5) (-3) = -15 + 15 = 0
right!
3 5 + (-5) 3 = 15 - 15 = 0
right!
Answer: 1 = (-5; -3), 2 = (5; 3).
If we assign x 2 = 1, substitute
x 1 + y 1 y 2 = 0.
y 1 y 2 = -x 1
Get the y 2 coordinate of a vector perpendicular to the vector = (x 1; y 1)


To obtain a second vector perpendicular to the vector = (x 1; y 1), but opposite to the vector  . Let
. Let

Then it is enough to change the signs of the coordinates of the vector .

Coordinates of two vectors perpendicular to the vector = (x 1; y 1) on the plane

Task. Given a vector = (3; -5). Find two normal vectors with different orientation.
Solution
Coordinates of two vectors perpendicular to the vector = (x 1; y 1) on the plane



Single vector coordinates

Second vector coordinates

To check the perpendicularity of vectors, we substitute their coordinates into the condition of perpendicularity of vectors
x 1 x 2 + y 1 y 2 = 0
3 1 + (-5) 0.6 = 3 - 3 = 0
right!
3 (-1) + (-5) (-0.6) = -3 + 3 = 0
right!
Answer: and.
If you assign x 2 \u003d - x 1, substitute
x 1 (-x 1) + y 1 y 2 = 0.
-x 1 2 + y 1 y 2 = 0.
y 1 y 2 = x 1 2
Get the coordinate of the vector perpendicular to the vector

If you assign x 2 \u003d x 1, substitute
x 1 x 1 + y 1 y 2 = 0.
x 1 2 + y 1 y 2 = 0.
y 1 y 2 = -x 1 2
Get the y coordinate of the second vector perpendicular to the vector

Coordinates of one vector perpendicular to the vector in the plane = (x 1; y 1)

Coordinates of the second vector, perpendicular to the vector in the plane = (x 1; y 1)

Coordinates of two vectors perpendicular to the vector = (x 1; y 1) on the plane

1.21 Cosine of the angle between vectors
The cosine of the angle between two non-zero vectors \u003d (x 1; y 1; z 1) and \u003d (x 2; y 2; z 2) is equal to the scalar product of vectors divided by the product of the lengths of these vectors


If  = 1, then the angle between the vectors is equal to 0 0 , the vectors are codirectional.
= 1, then the angle between the vectors is equal to 0 0 , the vectors are codirectional.
If 0<
< 1, то 0 0 <
 < 90 0 .
< 90 0 .
If = 0, then the angle between the vectors is equal to 90 0 , the vectors are perpendicular.
If -1< < 0, то 90 0 < < 180 0 .
If = -1, then the angle between the vectors is 180 0 , the vectors are oppositely directed.
If some vector is given by the coordinates of the beginning and end, then subtracting the coordinates of the beginning from the corresponding coordinates of the end of the vector, we obtain the coordinates of this vector.
Task. Find the angle between the vectors (0; -2; 0), (-2; 0; -4).
Solution
Dot product of vectors

 = 0 (-2) + (-2) 0 + 0 (-4) = 0,
= 0 (-2) + (-2) 0 + 0 (-4) = 0,
hence the angle between the vectors is  =
90 0 .
=
90 0 .
1.22 Properties of the Dot Product of Vectors
The properties of the scalar product are valid for any  ,
,
 ,
,
 ,k :
,k :
1.
 , if
, if  , then
, then  , if
, if  =
= , then
, then  =
0.
=
0.
2. Displacement law 
3. Distributive law 
4. Combination law  .
.
1.23 Direction vector direct
The directing vector of a line is a non-zero vector lying on a line or on a line parallel to the given line.
If the line is given by two points M 1 (x 1; y 1; z 1) and M 2 (x 2; y 2; z 2), then the vector is the guide  or its opposite vector
or its opposite vector  = - , whose coordinates
= - , whose coordinates
It is desirable to set the coordinate system so that the line passes through the origin, then the coordinates of the only point on the line will be the coordinates of the direction vector.
Task. Determine the coordinates of the directing vector of the straight line passing through the points M 1 (1; 0; 0), M 2 (0; 1; 0).
Solution

The direction vector of the straight line passing through the points M 1 (1; 0; 0), M 2 (0; 1; 0) is denoted
 . Each of its coordinates is equal to the difference between the corresponding coordinates of the end and beginning of the vector
. Each of its coordinates is equal to the difference between the corresponding coordinates of the end and beginning of the vector
= (0 - 1; 1 - 0; 0 - 0) = (-1; 1; 0)
Let's depict the directing vector of the straight line in the coordinate system with the beginning at the point M 1, with the end at the point M 2 and the vector equal to it
 from origin with end at point M (-1; 1; 0)
from origin with end at point M (-1; 1; 0)

1.24 Angle between two straight lines
Possible options for the relative position of 2 lines on the plane and the angle between such lines:
1. The lines intersect at a single point, forming 4 angles, 2 pairs of vertical angles are equal in pairs. The angle φ between two intersecting lines is the angle not exceeding the other three angles between these lines. Therefore, the angle between the lines φ ≤ 90 0 .

Intersecting lines can be, in particular, perpendicular φ = 90 0 .
Possible options for the relative position of 2 lines in space and the angle between such lines:
1. The lines intersect at a single point, forming 4 angles, 2 pairs of vertical angles are equal in pairs. The angle φ between two intersecting lines is the angle not exceeding the other three angles between these lines.
2. The lines are parallel, that is, they do not coincide and do not intersect, φ=0 0 .
3. The lines coincide, φ = 0 0 .
4. The lines intersect, that is, they do not intersect in space and are not parallel. The angle φ between intersecting lines is the angle between lines drawn parallel to these lines so that they intersect. Therefore, the angle between the lines φ ≤ 90 0 .
The angle between 2 lines is equal to the angle between the lines drawn parallel to these lines in the same plane. Therefore, the angle between the lines is 0 0 ≤ φ ≤ 90 0 .
Angle θ (theta) between vectors and 0 0 ≤ θ ≤ 180 0 .
If the angle φ between the lines α and β is equal to the angle θ between the direction vectors of these lines φ = θ, then
cos φ = cos θ.

If the angle between the lines φ = 180 0 - θ, then
cos φ \u003d cos (180 0 - θ) \u003d - cos θ.
cos φ = - cos θ.

Therefore, the cosine of the angle between the lines is equal to the modulus of the cosine of the angle between the vectors
cos φ = |cos θ|.
If the coordinates of non-zero vectors = (x 1 ; y 1 ; z 1) and = (x 2 ; y 2 ; z 2) are given, then the cosine of the angle θ between them

The cosine of the angle between the lines is equal to the modulus of the cosine of the angle between the direction vectors of these lines
cos φ = |cos θ| = 
The lines are the same geometric objects, therefore the same trigonometric functions cos are present in the formula.
If each of the two lines is given by two points, then the direction vectors of these lines and the cosine of the angle between the lines can be determined.
If cos φ \u003d 1, then the angle φ between the lines is 0 0, one of the directing vectors of these lines can be taken for these lines, the lines are parallel or coincide. If the lines do not coincide, then they are parallel. If the lines coincide, then any point of one line belongs to the other line.
If 0< cos φ ≤ 1, then the angle between the lines is 0 0< φ ≤ 90 0 , прямые пересекаются или скрещиваются. Если прямые не пересекаются, то они скрещиваются. Если прямые пересекаются, то они имеют общую точку.
If cos φ \u003d 0, then the angle φ between the lines is 90 0 (the lines are perpendicular), the lines intersect or intersect.
Task. Determine the angle between the lines M 1 M 3 and M 2 M 3 with the coordinates of the points M 1 (1; 0; 0), M 2 (0; 1; 0) and M 3 (0; 0; 1).
Solution
Let's construct the given points and straight lines in the Oxyz coordinate system.

We direct the directing vectors of the lines so that the angle θ between the vectors coincides with the angle φ between the given lines. Draw the vectors =
 and =
and =
 , as well as the angles θ and φ:
, as well as the angles θ and φ:

Let us determine the coordinates of the vectors and
= = (1 - 0; 0 - 0; 0 - 1) = (1; 0; -1);
= = (0 - 0; 1 - 0; 0 - 1) = (0; 1; -1). d = 0 and ax + by + cz = 0;
The plane is parallel to that coordinate axis, the designation of which is absent in the equation of the plane and, therefore, the corresponding coefficient is zero, for example, at c = 0, the plane is parallel to the Oz axis and does not contain z in the equation ax + by + d = 0;
The plane contains the axis of coordinates, the designation of which is missing, therefore, the corresponding coefficient is zero and d = 0, for example, at c = d = 0, the plane is parallel to the Oz axis and does not contain z in the equation ax + by = 0;
The plane is parallel to the coordinate plane, the notation of which is absent in the equation of the plane and, therefore, the corresponding coefficients are zero, for example, for b = c = 0, the plane is parallel to the coordinate plane Oyz and does not contain y, z in the equation ax + d = 0.
If the plane coincides with the coordinate plane, then the equation of such a plane is the equality to zero of the designation of the coordinate axis perpendicular to the given coordinate plane, for example, at x = 0, the given plane is the coordinate plane Oyz .
Task. The normal vector is given by the equation

Represent the equation of the plane in normal form.
Solution
Normal vector coordinates

A ; b; c ), then we can substitute the coordinates of the point M 0 (x 0; y 0; z 0) and the coordinates a, b, c of the normal vector into the general equation of the plane
ax + by + cz + d = 0 (1)
We get an equation with one unknown d
ax 0 + by 0 + cz 0 + d = 0
From here
d = -(ax 0 + by 0 + cz 0 )
Plane equation (1) after substitution d
ax + by + cz - (ax 0 + by 0 + cz 0) = 0
We obtain the equation of a plane passing through the point M 0 (x 0 ; y 0 ; z 0) perpendicular to a non-zero vector  (a ; b ; c )
(a ; b ; c )
a (x - x 0) + b (y - y 0) + c (z - z 0) = 0
Let's open the brackets
ax - ax 0 + by - by 0 + cz - cz 0 = 0
ax + by + cz - ax 0 - by 0 - cz 0 = 0
Denote
d = - ax 0 - by 0 - cz 0
We obtain the general equation of the plane
ax + by + cz + d = 0.
1.29 Equation of a plane passing through two points and the origin
ax + by + cz + d = 0.
It is desirable to set the coordinate system so that the plane passes through the origin of this coordinate system. Points M 1 (x 1 ; y 1 ; z 1) and M 2 (x 2 ; y 2 ; z 2) lying in this plane must be set so that the straight line connecting these points does not pass through the origin.
The plane will pass through the origin, so d = 0. Then the general equation of the plane becomes
ax + by + cz = 0.
Unknown 3 coefficients a , b , c . Substituting the coordinates of two points into the general equation of the plane gives a system of 2 equations. If we take some coefficient in the general equation of the plane equal to one, then the system of 2 equations will allow us to determine 2 unknown coefficients.
If one of the coordinates of the point is zero, then the coefficient corresponding to this coordinate is taken as one.
If some point has two zero coordinates, then the coefficient corresponding to one of these zero coordinates is taken as unity.
If a = 1 is accepted, then a system of 2 equations will allow us to determine 2 unknown coefficients b and c:


It is easier to solve the system of these equations by multiplying some equation by such a number that the coefficients for some unknown steel are equal. Then the difference of the equations will allow us to exclude this unknown, to determine another unknown. Substituting the found unknown into any equation will allow us to determine the second unknown.
1.30 Equation of a plane passing through three points
Let us define the coefficients of the general equation of the plane
ax + by + cz + d = 0,
passing through points M 1 (x 1 ; y 1 ; z 1), M 2 (x 2 ; y 2 ; z 2) and M 3 (x 3 ; y 3 ; z 3). Points must not have two identical coordinates.
Unknown 4 coefficients a , b , c and d . Substituting the coordinates of three points into the general equation of the plane gives a system of 3 equations. Take some coefficient in the general equation of the plane equal to one, then the system of 3 equations will allow you to determine 3 unknown coefficients. Usually accepted a = 1, then the system of 3 equations will allow you to determine 3 unknown coefficients b, c and d:

The system of equations is best solved by the elimination of unknowns (Gauss method). You can rearrange the equations in the system. Any equation can be multiplied or divided by any non-zero factor. Any two equations can be added, and the resulting equation can be written instead of either of these two added equations. The unknowns are excluded from the equations by obtaining a zero coefficient in front of them. In one equation, usually the lowest one is left with one variable that is defined. The found variable is substituted into the second equation from the bottom, in which 2 unknowns usually remain. The equations are solved from the bottom up and all unknown coefficients are determined.
The coefficients are placed in front of the unknowns, and the terms free from unknowns are transferred to the right side of the equations

The top row usually contains an equation that has a factor of 1 before the first or any unknown, or the entire first equation is divided by the factor before the first unknown. In this system of equations, we divide the first equation by y 1

Before the first unknown we got a coefficient of 1:

To reset the coefficient in front of the first variable of the second equation, we multiply the first equation by -y 2 , add it to the second equation, and write the resulting equation instead of the second equation. The first unknown in the second equation will be eliminated because
y 2 b - y 2 b = 0.
Similarly, we exclude the first unknown in the third equation by multiplying the first equation by -y 3 , adding it to the third equation and writing the resulting equation instead of the third equation. The first unknown in the third equation will also be eliminated because
y 3 b - y 3 b = 0.
Similarly, we exclude the second unknown in the third equation. We solve the system from the bottom up.
Task.
ax + by + cz + d = 0,
passing through the points M 1 (0; 0; 0), M 2 (0; 1; 0) and y+ 0 z + 0 = 0
x = 0.
The given plane is the coordinate plane Oyz .
Task. Determine the general equation of the plane
ax + by + cz + d = 0,
passing through the points M 1 (1; 0; 0), M 2 (0; 1; 0) and M 3 (0; 0; 1). Find the distance from this plane to the point M 0 (10; -3; -7).
Solution
Let's build the given points in the Oxyz coordinate system.

Accept a= 1. Substituting the coordinates of three points into the general equation of the plane gives a system of 3 equations
ℓ =
Web pages: 1 2 Vectors in the plane and in space (continued)
Andrey Georgievich Olshevsky's consultations on Skype da.irk.en
Preparation of students and schoolchildren in mathematics, physics, computer science, schoolchildren who want to get a lot of points (part C) and weak students for the OGE (GIA) and the exam. Simultaneous improvement of current performance through the development of memory, thinking, an understandable explanation of the complex, visual presentation of objects. A special approach to each student. Preparation for the Olympiads, providing benefits for admission. 15 years of experience in improving student achievement.
Higher mathematics, algebra, geometry, probability theory, mathematical statistics, linear programming.
A clear explanation of the theory, the elimination of gaps in understanding, teaching methods for solving problems, consulting when writing term papers, diplomas.
Aircraft, rocket and automobile engines. Hypersonic, ramjet, rocket, impulse detonation, pulsing, gas turbine, reciprocating internal combustion engines - theory, design, calculation, strength, design, manufacturing technology. Thermodynamics, heat engineering, gas dynamics, hydraulics.
Aviation, aeromechanics, aerodynamics, flight dynamics, theory, design, aerohydromechanics. Ultralight aircraft, ekranoplans, airplanes, helicopters, rockets, cruise missiles, hovercraft, airships, propellers - theory, design, calculation, strength, design, manufacturing technology.
Generation, implementation of ideas. Fundamentals of scientific research, methods of generation, implementation of scientific, inventive, business ideas. Teaching techniques for solving scientific problems, inventive problems. Scientific, inventive, writing, engineering creativity. Statement, selection, solution of the most valuable scientific, inventive problems, ideas.
Publications of the results of creativity. How to write and publish a scientific article, apply for an invention, write, publish a book. Theory of writing, defense of dissertations. Making money on ideas, inventions. Consulting in the creation of inventions, writing applications for inventions, scientific articles, applications for inventions, books, monographs, dissertations. Co-authorship in inventions, scientific articles, monographs.
Theoretical mechanics (theormech), strength of materials (sopromat), machine parts, theory of mechanisms and machines (TMM), engineering technology, technical disciplines.
Theoretical foundations of electrical engineering (TOE), electronics, fundamentals of digital, analog electronics.
Analytical geometry, descriptive geometry, engineering graphics, drafting. Computer graphics, graphics programming, drawings in AutoCAD, NanoCAD, photomontage.
Logic, graphs, trees, discrete mathematics.
OpenOffice and LibreOffice Basic, Visual Basic, VBA, NET, ASP.NET, macros, VBScript, Basic, C, C++, Delphi, Pascal, Delphi, Pascal, C#, JavaScript, Fortran, html, Matkad. Creation of programs, games for PC, laptops, mobile devices. Use of free ready-made programs, open source engines.
Creation, placement, promotion, programming of sites, online stores, earnings on sites, Web-design.
Informatics, PC user: texts, spreadsheets, presentations, training in typing for 2 hours, databases, 1C, Windows, Word, Excel, Access, Gimp, OpenOffice, AutoCAD, nanoCad, Internet, networks, e-mail.
Device, repair of stationary computers and laptops.
Video blogger, creating, editing, posting videos, video editing, making money on video blogs.
Choice, goal achievement, planning.
Learning to make money on the Internet: blogger, video blogger, programs, websites, online store, articles, books, etc.
You can support the development of the site, pay for the consulting services of Olshevsky Andrey Georgievich
10/15/17 Olshevsky Andrey Georgieviche-mail:[email protected]
Finally, I got my hands on an extensive and long-awaited topic analytical geometry. First, a little about this section of higher mathematics…. Surely you now remembered the school geometry course with numerous theorems, their proofs, drawings, etc. What to hide, an unloved and often obscure subject for a significant proportion of students. Analytic geometry, oddly enough, may seem more interesting and accessible. What does the adjective "analytical" mean? Two stamped mathematical turns immediately come to mind: “graphic method of solution” and “analytical method of solution”. Graphic method, of course, is associated with the construction of graphs, drawings. Analytical same method involves problem solving predominantly through algebraic operations. In this regard, the algorithm for solving almost all problems of analytical geometry is simple and transparent, often it is enough to accurately apply the necessary formulas - and the answer is ready! No, of course, it will not do without drawings at all, besides, for a better understanding of the material, I will try to bring them in excess of the need.
The open course of lessons in geometry does not claim to be theoretical completeness, it is focused on solving practical problems. I will include in my lectures only what, from my point of view, is important in practical terms. If you need a more complete reference on any subsection, I recommend the following quite accessible literature:
1) A thing that, no joke, is familiar to several generations: School textbook on geometry, authors - L.S. Atanasyan and Company. This school locker room hanger has already withstood 20 (!) reissues, which, of course, is not the limit.
2) Geometry in 2 volumes. Authors L.S. Atanasyan, Bazylev V.T.. This is literature for higher education, you will need first volume. Infrequently occurring tasks may fall out of my field of vision, and the tutorial will be of invaluable help.
Both books are free to download online. In addition, you can use my archive with ready-made solutions, which can be found on the page Download higher mathematics examples.
Of the tools, I again offer my own development - software package on analytical geometry, which will greatly simplify life and save a lot of time.
It is assumed that the reader is familiar with basic geometric concepts and figures: point, line, plane, triangle, parallelogram, parallelepiped, cube, etc. It is advisable to remember some theorems, at least the Pythagorean theorem, hello repeaters)
And now we will sequentially consider: the concept of a vector, actions with vectors, vector coordinates. Further I recommend reading the most important article Dot product of vectors, as well as Vector and mixed product of vectors. The local task will not be superfluous - Division of the segment in this regard. Based on the above information, you can equation of a straight line in a plane With the simplest examples of solutions, which will allow learn how to solve problems in geometry. The following articles are also helpful: Equation of a plane in space, Equations of a straight line in space, Basic problems on the line and plane , other sections of analytic geometry. Naturally, standard tasks will be considered along the way.
The concept of a vector. free vector
First, let's repeat the school definition of a vector. Vector called directed a segment for which its beginning and end are indicated:
In this case, the beginning of the segment is the point , the end of the segment is the point . The vector itself is denoted by . Direction is essential, if you rearrange the arrow to the other end of the segment, you get a vector, and this is already completely different vector. It is convenient to identify the concept of a vector with the movement of a physical body: you must admit that entering the doors of an institute or leaving the doors of an institute are completely different things.
It is convenient to consider individual points of a plane, space as the so-called zero vector. Such a vector has the same end and beginning.
!!! Note: Here and below, you can assume that the vectors lie in the same plane or you can assume that they are located in space - the essence of the material presented is valid for both the plane and space.
Designations: Many immediately drew attention to a stick without an arrow in the designation and said that they also put an arrow at the top! That's right, you can write with an arrow: , but admissible and record that I will use later. Why? Apparently, such a habit has developed from practical considerations, my shooters at school and university turned out to be too diverse and shaggy. In educational literature, sometimes they don’t bother with cuneiform at all, but highlight the letters in bold: , thereby implying that this is a vector.
That was the style, and now about the ways of writing vectors:
1) Vectors can be written in two capital Latin letters: ![]() etc. While the first letter necessarily denotes the start point of the vector, and the second letter denotes the end point of the vector.
etc. While the first letter necessarily denotes the start point of the vector, and the second letter denotes the end point of the vector.
2) Vectors are also written in small Latin letters:
In particular, our vector can be redesignated for brevity by a small Latin letter .
Length or module non-zero vector is called the length of the segment. The length of the null vector is zero. Logically.
The length of a vector is denoted by the modulo sign: ,
How to find the length of a vector, we will learn (or repeat, for whom how) a little later.
That was elementary information about the vector, familiar to all schoolchildren. In analytic geometry, the so-called free vector.
If it's quite simple - vector can be drawn from any point:
We used to call such vectors equal (the definition of equal vectors will be given below), but from a purely mathematical point of view, this is the SAME VECTOR or free vector. Why free? Because in the course of solving problems, you can “attach” one or another vector to ANY point of the plane or space you need. This is a very cool property! Imagine a vector of arbitrary length and direction - it can be "cloned" an infinite number of times and at any point in space, in fact, it exists EVERYWHERE. There is such a student's proverb: Each lecturer in f ** u in the vector. After all, not just a witty rhyme, everything is mathematically correct - a vector can be attached there too. But do not rush to rejoice, students themselves suffer more often =)
So, free vector- it a bunch of identical directional segments. The school definition of a vector, given at the beginning of the paragraph: “A directed segment is called a vector ...”, implies specific a directed segment taken from a given set, which is attached to a certain point in the plane or space.
It should be noted that from the point of view of physics, the concept of a free vector is generally incorrect, and the point of application of the vector matters. Indeed, a direct blow of the same force on the nose or on the forehead is enough to develop my stupid example entails different consequences. However, not free vectors are also found in the course of vyshmat (do not go there :)).
Actions with vectors. Collinearity of vectors
In the school geometry course, a number of actions and rules with vectors are considered: addition according to the triangle rule, addition according to the parallelogram rule, the rule of the difference of vectors, multiplication of a vector by a number, the scalar product of vectors, etc. As a seed, we repeat two rules that are especially relevant for solving problems of analytical geometry.
Rule of addition of vectors according to the rule of triangles
Consider two arbitrary non-zero vectors and : 
It is required to find the sum of these vectors. Due to the fact that all vectors are considered free, we postpone the vector from end vector : 
The sum of vectors is the vector . For a better understanding of the rule, it is advisable to put a physical meaning into it: let some body make a path along the vector , and then along the vector . Then the sum of the vectors is the vector of the resulting path starting at the point of departure and ending at the point of arrival. A similar rule is formulated for the sum of any number of vectors. As they say, the body can go its way strongly zigzag, or maybe on autopilot - along the resulting sum vector.
By the way, if the vector is postponed from start vector , then we get the equivalent parallelogram rule addition of vectors.
First, about the collinearity of vectors. The two vectors are called collinear if they lie on the same line or on parallel lines. Roughly speaking, we are talking about parallel vectors. But in relation to them, the adjective "collinear" is always used.
Imagine two collinear vectors. If the arrows of these vectors are directed in the same direction, then such vectors are called co-directional. If the arrows look in different directions, then the vectors will be oppositely directed.
Designations: collinearity of vectors is written with the usual parallelism icon: , while detailing is possible: (vectors are co-directed) or (vectors are directed oppositely).
work of a nonzero vector by a number is a vector whose length is equal to , and the vectors and are co-directed at and oppositely directed at .
The rule for multiplying a vector by a number is easier to understand with a picture: 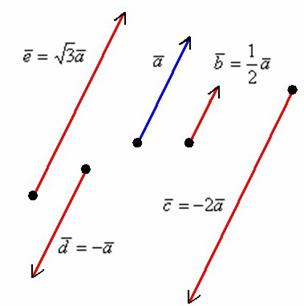
We understand in more detail:
1) Direction. If the multiplier is negative, then the vector changes direction to the opposite.
2) Length. If the factor is contained within or , then the length of the vector decreases. So, the length of the vector is twice less than the length of the vector . If the modulo multiplier is greater than one, then the length of the vector increases in time.
3) Please note that all vectors are collinear, while one vector is expressed through another, for example, . The reverse is also true: if one vector can be expressed in terms of another, then such vectors are necessarily collinear. In this way: if we multiply a vector by a number, we get collinear(relative to original) vector.
4) The vectors are codirectional. The vectors and are also codirectional. Any vector of the first group is opposite to any vector of the second group.
What vectors are equal?
Two vectors are equal if they are codirectional and have the same length. Note that co-direction implies that the vectors are collinear. The definition will be inaccurate (redundant) if you say: "Two vectors are equal if they are collinear, co-directed and have the same length."
From the point of view of the concept of a free vector, equal vectors are the same vector, which was already discussed in the previous paragraph.
Vector coordinates on the plane and in space
The first point is to consider vectors on a plane. Draw a Cartesian rectangular coordinate system and set aside from the origin single vectors and :

Vectors and orthogonal. Orthogonal = Perpendicular. I recommend slowly getting used to the terms: instead of parallelism and perpendicularity, we use the words respectively collinearity and orthogonality.
Designation: orthogonality of vectors is written with the usual perpendicular sign, for example: .
The considered vectors are called coordinate vectors or orts. These vectors form basis on surface. What is the basis, I think, is intuitively clear to many, more detailed information can be found in the article Linear (non) dependence of vectors. Vector basis.In simple words, the basis and the origin of coordinates define the entire system - this is a kind of foundation on which a full and rich geometric life boils.
Sometimes the constructed basis is called orthonormal basis of the plane: "ortho" - because the coordinate vectors are orthogonal, the adjective "normalized" means unit, i.e. the lengths of the basis vectors are equal to one.
Designation: the basis is usually written in parentheses, inside which in strict order basis vectors are listed, for example: . Coordinate vectors it is forbidden swap places.
Any plane vector the only way expressed as: ![]() , where - numbers, which are called vector coordinates in this basis. But the expression itself
, where - numbers, which are called vector coordinates in this basis. But the expression itself ![]() called vector decompositionbasis .
called vector decompositionbasis .
Dinner served:

Let's start with the first letter of the alphabet: . The drawing clearly shows that when decomposing the vector in terms of the basis, the ones just considered are used:
1) the rule of multiplication of a vector by a number: and ;
2) addition of vectors according to the triangle rule: .
Now mentally set aside the vector from any other point on the plane. It is quite obvious that his corruption will "relentlessly follow him." Here it is, the freedom of the vector - the vector "carries everything with you." This property, of course, is true for any vector. It's funny that the basis (free) vectors themselves do not have to be set aside from the origin, one can be drawn, for example, at the bottom left, and the other at the top right, and nothing will change from this! True, you don’t need to do this, because the teacher will also show originality and draw you a “pass” in an unexpected place.
Vectors , illustrate exactly the rule for multiplying a vector by a number, the vector is co-directed with the basis vector , the vector is directed opposite to the basis vector . For these vectors, one of the coordinates is equal to zero, it can be meticulously written as follows:
And the basis vectors, by the way, are like this: (in fact, they are expressed through themselves).
And finally: , . By the way, what is vector subtraction, and why didn't I tell you about the subtraction rule? Somewhere in linear algebra, I don't remember where, I noted that subtraction is a special case of addition. So, the expansions of the vectors "de" and "e" are calmly written as a sum: ![]() . Rearrange the terms in places and follow the drawing how clearly the good old addition of vectors according to the triangle rule works in these situations.
. Rearrange the terms in places and follow the drawing how clearly the good old addition of vectors according to the triangle rule works in these situations.
Considered decomposition of the form ![]() sometimes called a vector decomposition in the system ort(i.e. in the system of unit vectors). But this is not the only way to write a vector, the following option is common:
sometimes called a vector decomposition in the system ort(i.e. in the system of unit vectors). But this is not the only way to write a vector, the following option is common:
Or with an equals sign:
The basis vectors themselves are written as follows: and
That is, the coordinates of the vector are indicated in parentheses. In practical tasks, all three recording options are used.
I doubted whether to speak, but still I will say: vector coordinates cannot be rearranged. Strictly in first place write down the coordinate that corresponds to the unit vector , strictly in second place write down the coordinate that corresponds to the unit vector . Indeed, and are two different vectors.
We figured out the coordinates on the plane. Now consider vectors in three-dimensional space, everything is almost the same here! Only one more coordinate will be added. It is difficult to perform three-dimensional drawings, so I will limit myself to one vector, which for simplicity I will postpone from the origin: 
Any 3d space vector the only way expand in an orthonormal basis: ![]() , where are the coordinates of the vector (number) in the given basis.
, where are the coordinates of the vector (number) in the given basis.
Example from the picture: ![]() . Let's see how the vector action rules work here. First, multiplying a vector by a number: (red arrow), (green arrow) and (magenta arrow). Secondly, here is an example of adding several, in this case three, vectors: . The sum vector starts at the starting point of departure (the beginning of the vector ) and ends up at the final point of arrival (the end of the vector ).
. Let's see how the vector action rules work here. First, multiplying a vector by a number: (red arrow), (green arrow) and (magenta arrow). Secondly, here is an example of adding several, in this case three, vectors: . The sum vector starts at the starting point of departure (the beginning of the vector ) and ends up at the final point of arrival (the end of the vector ).
All vectors of three-dimensional space, of course, are also free, try to mentally postpone the vector from any other point, and you will understand that its expansion "remains with it."
Similarly to the plane case, in addition to writing ![]() versions with brackets are widely used: either .
versions with brackets are widely used: either .
If one (or two) coordinate vectors are missing in the expansion, then zeros are put instead. Examples:
vector (meticulously ![]() ) – write down ;
) – write down ;
vector (meticulously ![]() ) – write down ;
) – write down ;
vector (meticulously ![]() ) – write down .
) – write down .
Basis vectors are written as follows:
Here, perhaps, is all the minimum theoretical knowledge necessary for solving problems of analytical geometry. Perhaps there are too many terms and definitions, so I recommend dummies to re-read and comprehend this information again. And it will be useful for any reader to refer to the basic lesson from time to time for better assimilation of the material. Collinearity, orthogonality, orthonormal basis, vector decomposition - these and other concepts will be often used in what follows. I note that the materials of the site are not enough to pass a theoretical test, a colloquium on geometry, since I carefully encrypt all theorems (besides without proofs) - to the detriment of the scientific style of presentation, but a plus for your understanding of the subject. For detailed theoretical information, I ask you to bow to Professor Atanasyan.
Now let's move on to the practical part:
The simplest problems of analytic geometry.
Actions with vectors in coordinates
The tasks that will be considered, it is highly desirable to learn how to solve them fully automatically, and the formulas memorize, don't even remember it on purpose, they will remember it themselves =) This is very important, since other problems of analytical geometry are based on the simplest elementary examples, and it will be annoying to spend extra time eating pawns. You do not need to fasten the top buttons on your shirt, many things are familiar to you from school.
The presentation of the material will follow a parallel course - both for the plane and for space. For the reason that all the formulas ... you will see for yourself.
How to find a vector given two points?
If two points of the plane and are given, then the vector has the following coordinates: ![]()
If two points in space and are given, then the vector has the following coordinates:
That is, from the coordinates of the end of the vector you need to subtract the corresponding coordinates vector start.
Exercise: For the same points, write down the formulas for finding the coordinates of the vector. Formulas at the end of the lesson.
Example 1
Given two points in the plane and . Find vector coordinates
Solution: according to the corresponding formula:
Alternatively, the following notation could be used:
Aesthetes will decide like this:
Personally, I'm used to the first version of the record.
Answer:
According to the condition, it was not required to build a drawing (which is typical for problems of analytical geometry), but in order to explain some points to dummies, I will not be too lazy: 
Must be understood difference between point coordinates and vector coordinates:
Point coordinates are the usual coordinates in a rectangular coordinate system. I think everyone knows how to plot points on the coordinate plane since grade 5-6. Each point has a strict place on the plane, and they cannot be moved anywhere.
The coordinates of the same vector is its expansion with respect to the basis , in this case . Any vector is free, therefore, if necessary, we can easily postpone it from some other point in the plane. Interestingly, for vectors, you can not build axes at all, a rectangular coordinate system, you only need a basis, in this case, an orthonormal basis of the plane.
The records of point coordinates and vector coordinates seem to be similar: , and sense of coordinates absolutely different, and you should be well aware of this difference. This difference, of course, is also true for space.
Ladies and gentlemen, we fill our hands:
Example 2
a) Given points and . Find vectors and .
b) Points are given ![]() and . Find vectors and .
and . Find vectors and .
c) Given points and . Find vectors and .
d) Points are given. Find Vectors ![]() .
.
Perhaps enough. These are examples for an independent decision, try not to neglect them, it will pay off ;-). Drawings are not required. Solutions and answers at the end of the lesson.
What is important in solving problems of analytical geometry? It is important to be EXTREMELY CAREFUL in order to avoid the masterful “two plus two equals zero” error. I apologize in advance if I made a mistake =)
How to find the length of a segment?
The length, as already noted, is indicated by the modulus sign.
If two points of the plane and are given, then the length of the segment can be calculated by the formula
If two points in space and are given, then the length of the segment can be calculated by the formula
Note: The formulas will remain correct if the corresponding coordinates are swapped: and , but the first option is more standard
Example 3
Solution: according to the corresponding formula:
Answer: ![]()
For clarity, I will make a drawing 
Section - it's not a vector, and you can't move it anywhere, of course. In addition, if you complete the drawing to scale: 1 unit. \u003d 1 cm (two tetrad cells), then the answer can be checked with a regular ruler by directly measuring the length of the segment.
Yes, the solution is short, but there are a couple of important points in it that I would like to clarify:
First, in the answer we set the dimension: “units”. The condition does not say WHAT it is, millimeters, centimeters, meters or kilometers. Therefore, the general formulation will be a mathematically competent solution: “units” - abbreviated as “units”.
Secondly, let's repeat the school material, which is useful not only for the considered problem:
pay attention to important technical trick – taking the multiplier out from under the root. As a result of the calculations, we got the result and good mathematical style involves taking the multiplier out from under the root (if possible). The process looks like this in more detail: ![]() . Of course, leaving the answer in the form will not be a mistake - but it is definitely a flaw and a weighty argument for nitpicking on the part of the teacher.
. Of course, leaving the answer in the form will not be a mistake - but it is definitely a flaw and a weighty argument for nitpicking on the part of the teacher.
Here are other common cases: 
Often a sufficiently large number is obtained under the root, for example. How to be in such cases? On the calculator, we check if the number is divisible by 4:. Yes, split completely, thus: ![]() . Or maybe the number can be divided by 4 again? . In this way:
. Or maybe the number can be divided by 4 again? . In this way: ![]() . The last digit of the number is odd, so dividing by 4 for the third time is clearly not possible. Trying to divide by nine: . As a result:
. The last digit of the number is odd, so dividing by 4 for the third time is clearly not possible. Trying to divide by nine: . As a result:
Ready.
Conclusion: if under the root we get a completely non-extractable number, then we try to take out the factor from under the root - on the calculator we check whether the number is divisible by: 4, 9, 16, 25, 36, 49, etc.
In the course of solving various problems, roots are often found, always try to extract factors from under the root in order to avoid a lower score and unnecessary troubles with finalizing your solutions according to the teacher's remark.
Let's repeat the squaring of the roots and other powers at the same time: 
The rules for actions with degrees in a general form can be found in a school textbook on algebra, but I think that everything or almost everything is already clear from the examples given.
Task for an independent solution with a segment in space:
Example 4
Given points and . Find the length of the segment.
Solution and answer at the end of the lesson.
How to find the length of a vector?
If a plane vector is given, then its length is calculated by the formula.
If a space vector is given, then its length is calculated by the formula ![]() .
.
The uniqueness of the coefficients of a linear combination is proved in the same way as in the previous corollary.
Consequence: Any four vectors are linearly dependent
Chapter 4. The concept of a basis. Vector properties in a given basis
Definition:basis in space any ordered triple of non-coplanar vectors is called.
Definition:Basis on the plane any ordered pair of non-collinear vectors is called.
A basis in space allows you to unambiguously associate each vector with an ordered triple of numbers - the coefficients of representing this vector as a linear combination of basis vectors. On the contrary, with the help of the basis, we will associate a vector with each ordered triple of numbers if we make a linear combination.

Numbers are called components (or coordinates ) of the vector in the given basis (written as ).
Theorem: When two vectors are added, their coordinates are added. When a vector is multiplied by a number, all coordinates of the vector are multiplied by that number.
Indeed, if and ![]() , then
, then
The definition and properties of the coordinates of a vector on a plane are similar. You can easily formulate them yourself.
Chapter 5
Under angle between vectors the angle between vectors equal to data and having a common origin is understood. If the angle reference direction is not specified, then the angle between the vectors is considered to be one of the angles that does not exceed π. If one of the vectors is zero, then the angle is considered to be zero. If the angle between the vectors is a straight line, then the vectors are called orthogonal .
Definition:orthogonal projection
vector
to the direction of the vector
called a scalar ![]() ,
φ
is the angle between the vectors (Fig. 9).
,
φ
is the angle between the vectors (Fig. 9).
The modulus of this scalar quantity is equal to the length of the segment OA 0 .
If the angle φ is an acute projection is a positive value, if the angle φ is obtuse - the projection is negative, if the angle φ is a straight line - the projection is zero.
In orthogonal projection, the angle between the segments OA 0 and AA 0 straight. There are projections in which this angle is different from the right one.
Vector projections have the following properties:
The basis is called orthogonal if its vectors are pairwise orthogonal.

The orthogonal basis is called orthonormal if its vectors are equal to one in length. For an orthonormal basis in space, the notation is often used.
Theorem: In an orthonormal basis, the coordinates of the vectors are the corresponding orthogonal projections of this vector onto the directions of the coordinate vectors.
Example: Let a unit length vector form an angle φ with an orthonormal basis vector on the plane, then ![]()
 .
.
Example: Let a vector of unit length form angles α, β, γ, respectively, with the vectors , and of an orthonormal basis in space (Fig. 11), then . And . The quantities cosα, cosβ, cosγ are called direction cosines of the vector
Chapter 6
Definition: The scalar product of two vectors is a number equal to the product of the lengths of these vectors and the cosine of the angle between them. If one of the vectors is zero the dot product is considered to be zero.
The scalar product of vectors and is denoted by [or ; or ]. If φ is the angle between the vectors and , then ![]() .
.
The scalar product has the following properties:
Theorem: In an orthogonal basis, the components of any vector are found by the formulas:
Indeed, let , and each term is collinear to the corresponding basis vector. It follows from the theorem of the second section that , where the plus or minus sign is chosen depending on whether the vectors , and are directed in the same or opposite direction. But, , where φ is the angle between the vectors , and . So, ![]() . Other components are calculated similarly.
. Other components are calculated similarly.
The scalar product is used to solve the following main tasks:
1. ;
2.  ;
3.
;
3.  .
.
Let vectors be given in some basis, and then, using the properties of the scalar product, we can write:
The quantities are called the metric coefficients of the given basis. Hence ![]() .
.
Theorem: In an orthonormal basis
![]() ;
;![]() ;
;![]() ;
;![]() .
.
Comment: All arguments in this section are given for the case of the location of vectors in space. The case of the location of vectors on the plane is obtained by removing the extra components. The author suggests that you do it yourself.
Chapter 7
An ordered triple of non-coplanar vectors is called right oriented (right ) if, after applying to the common beginning from the end of the third vector, the shortest turn from the first vector to the second one is visible counterclockwise. Otherwise, an ordered triple of non-coplanar vectors is called left-handed (left ).
Definition: The vector product of a vector by a vector is a vector that satisfies the conditions:
If one of the vectors is zero, then the cross product is a zero vector.
The cross product of a vector by a vector is denoted by (or ).
Theorem: A necessary and sufficient condition for the collinearity of two vectors is the equality of their vector product to zero.
Theorem: The length (modulus) of the cross product of two vectors is equal to the area of the parallelogram built on these vectors as on the sides.
Example: If is a right orthonormal basis, then , , .
Example: If is a left orthonormal basis, then ![]() ,
,
,
,
![]() .
.

Example: Let and be orthogonal to . Then it is obtained from the vector by rotating around the vector on clockwise (when viewed from the end of the vector ).
A vector is a directed segment of a straight line in Euclidean space, in which one end (point A) is called the beginning of the vector, and the other end (point B) is called the end of the vector (Fig. 1). Vectors are denoted:

If the beginning and end of the vector are the same, then the vector is called zero vector and denoted 0 .
Example. Let the beginning of the vector in two-dimensional space have coordinates A(12,6) , and the end of the vector is the coordinates B(12.6). Then the vector is a null vector.
Cut length AB called module (length, the norm) vector and is denoted by | a|. A vector of length equal to one is called unit vector. In addition to the modulus, a vector is characterized by a direction: a vector has a direction from A To B. A vector is called a vector, opposite vector .

The two vectors are called collinear if they lie on the same line or on parallel lines. In Fig. 3 red vectors are collinear since they lie on the same straight line, and the blue vectors are collinear, because they lie on parallel lines. Two collinear vectors are called equally directed if their ends lie on the same side of the line joining their beginnings. Two collinear vectors are called opposite directions if their ends lie on opposite sides of the line joining their beginnings. If two collinear vectors lie on the same line, then they are said to be equally directed if one of the rays formed by one vector completely contains the ray formed by the other vector. Otherwise, the vectors are called oppositely directed. In Figure 3, the blue vectors are in the same direction and the red vectors are in the opposite direction.

The two vectors are called equal if they have equal modules and are equally directed. In Fig.2, the vectors are equal because their moduli are equal and have the same direction.
The vectors are called coplanar if they lie on the same plane or in parallel planes.
V n In a dimensional vector space, consider the set of all vectors whose starting point coincides with the origin. Then the vector can be written in the following form:
| (1) |
where x 1 , x 2 , ..., x n vector end point coordinates x.
The vector written in the form (1) is called row vector, and the vector written as
| (2) |
called column vector.
Number n called dimension (in order) vector. If ![]() then the vector is called zero vector(because the starting point of the vector
then the vector is called zero vector(because the starting point of the vector ![]() ). Two vectors x and y are equal if and only if their corresponding elements are equal.
). Two vectors x and y are equal if and only if their corresponding elements are equal.